


一、动态系统
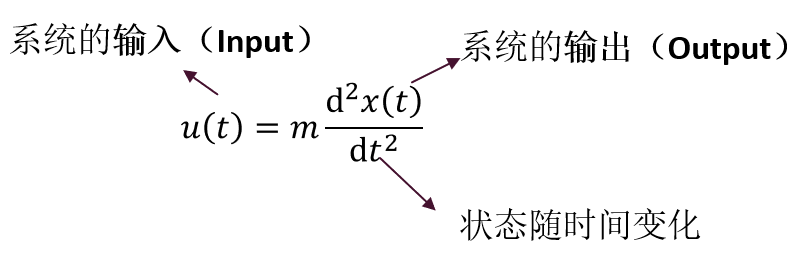
控制理论的研究对象是 动态系统(Dynamic System)。动态系统是指状态随时间变化的系统,其特点为系统的状态变量(State Variable)是时间的函数。
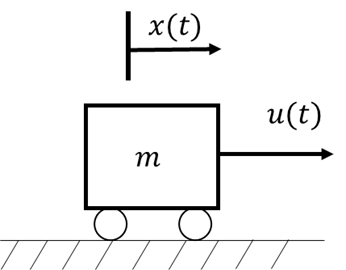
在光滑平面上对这个质量为m的小车施加一个随时间变化的力U(t),这便是一个动态系统。位移X(t)是此系统的状态变量,它是时间的函数。

二、控制系统

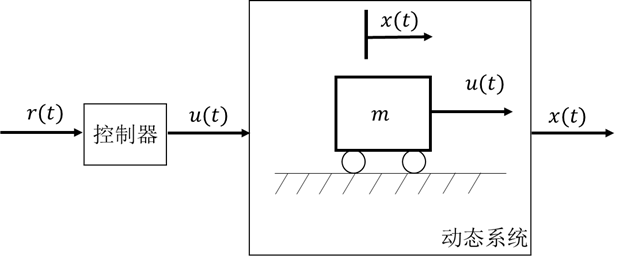

控制器会根据参考值(Reference)r(t)决定控制量,即动图系统的输入u(t)。这种控制方式就称为开环(Open Loop)控制。
当系统的全部信息准确无误且可知时,开环控制就可以完美的达成控制目标。但如果系统的输入输出模型不够准确,或者是存在扰动,那么开环控制器就无法提供准确的控制量。在实际场景中,扰动无处不在,完美的数学模型是几乎不存在的,因此开环系统大多只能应用于简单的、对精度要求不高的系统中。
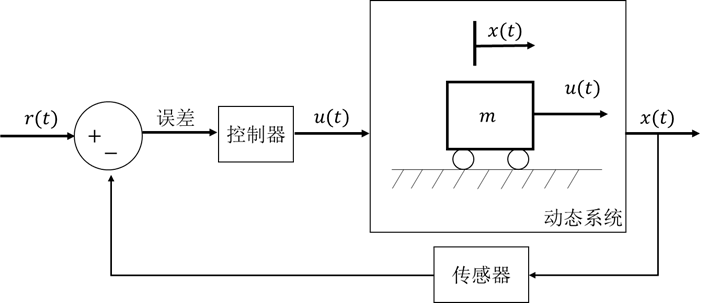

如果希望精确的控制系统,则需要使用闭环(Closed Loop)控制系统,在闭环控制中会测量系统的输出,并将其反馈(Feedback)到输入端于参考值进行比较。参考值与实际系统输出的差称为误差(Error),控制器将根据误差调整控制量。