


归档
共 7 篇文章
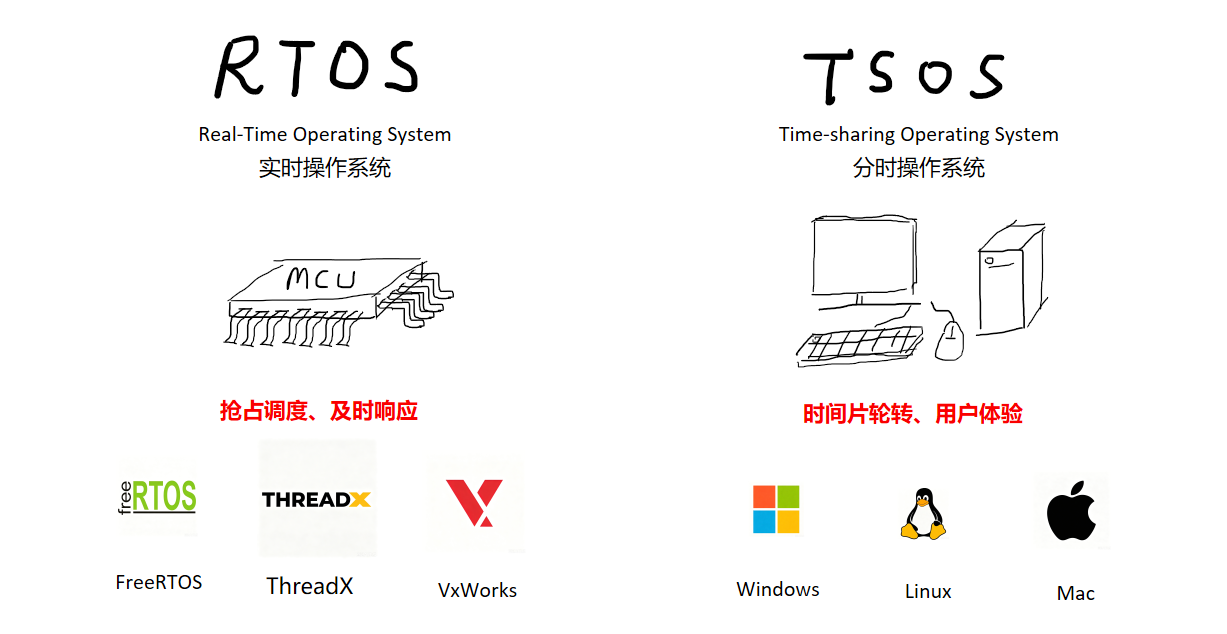
第一章 FreeRTOS简介
一、理查德巴利与FreeRTOS 1.RTOS和FreeRTOS的概念 RTOS是操作系统的一种类型。它是Real-Time Operating System的缩写,也就是实时操作系统。这种操作系统强调实时性,使用抢占式调度。打个比方,比如你在公园散步的时候来了电话,你就得停下脚步接电话。高优先级的
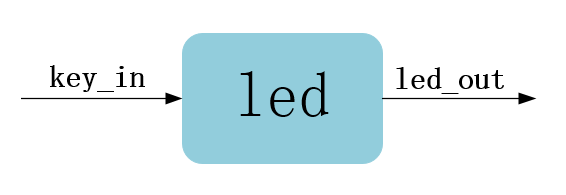
点亮你的 LED 灯
一、模块和端口信号划分

初识 Verilog HDL
一、语言简介 Verilog HDL 是一种硬件描述语言,以文本形式来描述数字系统硬件的结构和行为的语言,用它可以来表示逻辑电路图、逻辑表达式,还可以表示数字逻辑系统所完成的逻辑功能。 二、Verilog HDL 语言基础语法 2.1 逻辑值 0:逻辑低电平,条件为假 1:逻辑高电平,条件为真 z:
初识 FPGA
一、FPGA 是什么 1.1 名词解释 FPGA(Field Programmable Gate Array, 简称 FPGA) ,译文:现场可编程门阵列,一种主要以数字电路为主的集成芯片, 于 1985 年由 Xilinx 创始人之一 Ross Freeman 发明,属于可编程逻辑器件 PLD(
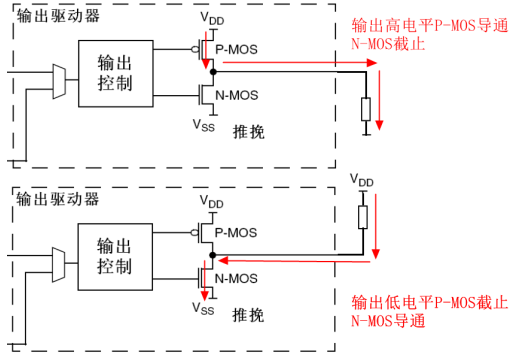
GPIO专题
一、GPIO 功能模式分析 1.推挽输出 推挽电路是两个参数相同的三极管或 MOSFET,以推挽方式存在于电路中。 电路工作时,两只对称的开关管每次只有一个导通,导通损耗小、效率高。输出既可以向负载灌电流,也可以从负载抽取电流。推拉式输出级提高电路的负载能力。 相对于开漏输出模式,推挽输出最大优势是

什么年代了,还在写传统简历?
这个中文 LaTeX 简历模板,为什么值得技术同学收藏 如果你正在找一套适合中文技术简历的模板,又不想把时间浪费在排版折腾上,那么 auto-cv 值得看一眼。

LVGL学习日记——初识
一、LVGL源码的目录结构 demos:存放的是LVGL⼀些综合的内置⽰例,部分⽰例可以在https://lvgl.io/demos 体验。 docs:存放LVGL的开发⽂档,阅读时⼀般不在这⾥直接阅读,⽽是在LVGL的⽂档站点阅读。 env_support:⼀些环境或者平台的⽀持,⽐如我们所使⽤的